Navigation progress for indoors and UAVs
GPS World - Tony Murfin • July 19, 2019
CAL Analytics Presents Detect and Avoid Research at IEEE/ION PLANS

I didn’t get to this year’s IEEE/ION PLANS meeting in Savannah, Georgia, in April, but I did find a few papers that interested me. You might have read past articles of mine that looked at the challenges of indoor navigation. And, of course, unmanned vehicles technology also is one of my favorites.
So, I was pleased to find papers that addressed a few key issues for me:
- An approach that employs cooperative smartphones to achieve about 3 meters indoor location.
- Another look at the problems in using smartphone embedded GNSS for RTK positioning.
- Relative positioning between UAVs using GNSS, radio and inertial, and also adding image processing in a GNSS denied environment.
- Analysis of encounter-alerting issues for UAV detect and avoid systems.
Indoor navigation
Indoor navigation is an area which is seeing quite intense research, and several companies have now put initial products on the market. The general approach has been to use sensors within smartphones combined with radio-frequency (RF) signals which seem to be readily available in stores and malls which indoor location is finding commercial applications.
If a position can be generated by an internal GNSS receiver within the phone in an outdoor setting prior to entering a building, the trick is to carry that position forward as GNSS signals disappear when the user moves away from the entry area. Inertial sensors in the phone are usually not accurate enough to do this job on their own, so ranging using RF from Bluetooth and Wi-Fi transmitters/beacons may be integrated to provide a position solution. Magnetic sensors in the phone have also been used to detect fixed metal structures within a building and use this data to aid location determination.
The problem is that you need an up-to-date database of where the Wi-Fi and Bluetooth are located, and it has been taking a lot of work to map or “fingerprint” the interiors of buildings — and guess what, these “beacons” often are moved after a mall or store is mapped, so RF ranging can become quite inaccurate.
So, fearless investigators from the University of Buckingham and University of Northampton in the U.K. have come up with the concept of using ranging between cooperative smartphones to aid each other and achieve location accuracies of 5-10 meters.
While outdoors with good GNSS position, the inertial sensors in each phone are calibrated, each phone gets position using its internal GPS and a network is formed between the phones using their relative positions. Then when a phone goes inside the building, step counting is used to maintain relative positioning in the network. This can result in around 3 meters positioning for the interior phone.
Well, yes, not everyone has two other buddies waiting around so one guy can go in and find the classic comic store, but for applications such as firefighters, urgent/health care, and security/police, this approach might work well.
Another paper looked hard at the options there might be to resolve problems with GPS performance which has previously precluded running RTK on smartphones. If we could achieve centimeter positioning on a mass-market basis, many current applications which are inhibited by cost, could become possible and revolutionize even the way we live. People have already used external solutions to solve some of the problems, but leading researchers at Texas U, with Broadcom and Radiosense support, may have come up with a self-contained solution.
It is known that there are issues with the capability of the GNSS chip and oscillator components in smartphones — the observables they produce are not currently of sufficient quality to sustain RTK performance. So these researchers worked with Broadcom, who supplied them with an Android smartphone, which provided access to raw code and carrier-phase outputs and was also able to process these measurements internally.
Carrier phase measurements in smartphones suffer from five anomalies not found in survey-grade GNSS receivers — but four of these can be fixed in post-processing. The remaining phase measurement error increases with time and precludes RTK centimeter-level positioning — it could be the result of round-off error due to processing limitations. Otherwise it seems possible that carrier-phase differential GNSS positioning might be achievable.
However, the researchers also studied antenna performance and found that its gain pattern was significantly affected by strong local multipath. The impact is that deep, unpredictable fading and large phase error will compromise centimeter-accurate positioning.
So we’re not quite there yet, but with a new smartphone version showing up almost every other year, it is always possible that researchers and manufacturers will eventually evolve designs in the right direction, and ultimately solve the problem.
Unmanned aerial vehicles
Meanwhile, researchers at West Virginia University have been investigating methods to maintain relative positioning between UAVs in flight. With drone “swarms” and cooperative drone missions becoming more common, if a simple method could be derived to maintain relative separation, these applications could become more prevalent, especially in a GPS denied environment.
So, with only noisy ranging radios between UAVs, and an onboard navigation system solution on each vehicle, the researchers set about developing an algorithm which can maintain relative position. The solution is complicated by the geometry between the UAVs, how often range measurements are made, and the noise in those measurements. To constrain these variables, the study was run assuming the UAVs travel at the same altitude.
The study concluded that— provided the UAVs travel in the same direction, parallel to each other — that their algorithm could find a solution all the time. The focus of the study appears to be on determining hearing and relative bearing between the vehicles and results were varied depending on the frequency of range measurements, the amount of noise and the geometry. So a few steps forward along the path towards making drones work together in a hostile environment where GPS is jammed. (See “Cooperative Relative Localization for Moving UAVs with Single Link Range Measurements,” J. Strader, Y.Gu, J.N. Gross, M. De Petrillo, J. Hardy.)
Another study on the same problem of maintaining relative position between drones was also undertaken by West Virginia University, Systems & Technology Research and the Air Force Research Laboratory. However, their solution didn’t only use ranging between vehicles. It took advantage of inertial measurements on each drone, computer vision calculations derived from downwards looking cameras on both UAVs, and finally magnetometer measurements were also added into a Kalman filter solution.
With several additional sensor measurements, the researchers were able to predict that relative positioning could be maintained in a GPS denied environment. They also considered ranging radio, magnetometer and vision update rates, and the performance/update rate of various quality inertial sensors. The principle objective is to enable accurate target hand-off between drones as one approaches the other. Overall, they found their model could support 10-meter-level position and 0.5 degree accuracy.
Finally, for safe operation of UAVs in the U.S. National Airspace System (NAS), minimum Detect and Avoid (DAA) standards for small to medium size UAVs are being developed for operations within drone-accessible airspace. DAA has to provide the “see and avoid” for unmanned aircraft systems (UAS) that pilots of manned aircraft use to avoid other aircraft. So surveillance sensor information needs to supply the UAV and the remote Pilot in Command (PIC) operator with the situational awareness needed to remain well clear of other aircraft.
Part of what DAA should provide are alerts working to universal standards for all UAS.
The research presented by CAL Analytics and General Atomics (with technical support and guidance by RTCA committee SC-228 and NASA) outlined the evaluation alerts generated when other aircraft are anticipated to penetrate into a well-clear volume around a UAV.
Alerts can be “missed,” “late” and “early” — all of which can impair DAA performance and safety and which need to characterized and mitigated. Sensors currently under consideration for use in DAA include Automatic Dependent Surveillance Broadcast (ADS-B), active surveillance transponder and airborne radar — this study looked at ADS-B and radar and the trade-off that they provide related to desirable and undesirable alerts.This analysis will likely feed into the development of UAS DAA alerting standards and requirements.
Radar surveillance errors were found to increase the probability of Missed, Late, Short, Early and Incorrect Alerts, all of which is bad news for radar. ADS-B surveillance errors increased the probability of Short, Early, and Incorrect Alerts. However, ADS-B did not lower performance as much as radar — better news for ADS-B. All levels of surveillance errors were seen to increase the amount of alerting jitter, with radar seeing the most significant undesirable effects.
Highly reliable, proven DAA systems are likely an essential part of the safety system for UAS if they are to become a regular part of operations in the NAS. General Atomics has tested a DAA system including GA’s Due Regard Radar (DRR) aboard a U.S. Customs and Border Protection (CBP) Guardian Unmanned Aircraft System (UAS), a maritime variant of the Predator B UAV. The DAA system also includes Honeywell’s Traffic Alert and Collision Avoidance System (TCAS) and Sensor Tracker, specifically designed for DAA.
And, also in December of last year, a Schiebel Camcopter S-100 flew demonstration flights with an NLR-developed AirScout Detect and Avoid System. Two helicopters flew “intruder” profiles against the UAV during the demonstration. The Camcopter S-100 flew several scenarios and “unexpectedly” encountered an intruder aircraft. The system determined in real time the corrective action to maintain separation from the intruder aircraft.
So, progress on indoor navigation, research towards running RTK on smartphones, relative positioning between UAVs, and advances in Detect and Avoid solutions for UAVs. Something of a mixed bag, but all promise further progress around different solutions for a number of market navigation segments.
Originally published by GPS World.

COLUMBUS, OH (February 9, 2026) — Ohio continues to lead the nation in modernizing emergency response with the selection of nine public safety agencies to participate in the Ohio Statewide Drone First Responder (DFR) Pilot Program , a first-of-its-kind initiative designed to expand rapid aerial response capabilities across communities of all sizes. The program, led by the Ohio Department of Transportation (ODOT) and DriveOhio, with program management support from SkyfireAI, reflects Ohio’s commitment to equipping first responders with innovative tools that improve situational awareness, enhance officer and responder safety, and reduce emergency response times. The following agencies have been selected to participate in the pilot program: City of Springfield Police/Fire/EMS Athens Police Department Lima Police Department Toledo Police Department Violet Township Fire/EMS Austintown Fire Department City of Hamilton Police/Fire/EMS Amherst Police Department Kelleys Island Fire/EMS Together, these agencies represent a diverse cross-section of Ohio, spanning urban centers, suburban communities, and rural jurisdictions — reinforcing the program’s goal of ensuring access to advanced emergency response capabilities statewide. Many of the selected agencies have also committed to sharing drone resources with neighboring jurisdictions, further expanding the impact of this program. “Ohio is committed to giving our first responders the tools they need to protect lives and serve their communities safely and effectively,” said Governor Mike DeWine . “This statewide Drone First Responder pilot reflects Ohio’s leadership in innovation, our strong partnership with local agencies, and our focus on using technology responsibly to support public safety across the state.” Created under Ohio House Bill 96, the Ohio Statewide DFR Pilot Program enables participating agencies to deploy state-approved, NDAA-compliant drone systems capable of rapid launch, real-time video streaming to command staff, and integration into Ohio’s emerging uncrewed aircraft traffic management framework, led by Ohio-based CAL Analytics. “We are enthusiastic supporters of DFR program and thankful for the efforts of so many Ohio leaders to accelerate this program into the execution phase,” said State Representative Adam Holmes , who championed the program's inclusion in the bill. “The DFR program will greatly enhance first responder effectiveness and will provide increased support for all Ohioans. A tremendous capability for our priceless first responders.” “Ohio is leading the way for the nation with the first statewide DFR program! Our ODOT leaders are setting the stage for an integrated network of DFR assets that will undoubtedly save lives and resources and be a force-multiplier for our undermanned first responder organizations,” said State Representative Bernard Willis , Chair of the House Transportation Committee. “In Ohio, the HOME of aviation we are the BEST at making historic innovations with flying machines, and we will NEVER stop leading the way!” With technology known as drone-in-a-box, a drone can be launched from a permanent docking site and be flown remotely to a scene. These pre-positioned drones provide real-time visual information to aid decision-making, and some can also drop critical medical supplies to the scene of an emergency. The program emphasizes operational readiness, standardized training, and responsible use, while maintaining a strong focus on community engagement and transparency. “This program is about thoughtful implementation, not experimentation,” said Richard Fox, Director of the DriveOhio UAS Center . "By coordinating procurement, training, and regulatory support at the state level, Ohio is creating a scalable model that benfits communities of every size. We're grateful for the confidence the legislature has in ODOT to execute this groundbreaking program." SkyfireAI, a national leader in public safety drone program development and FAA regulatory integration, is supporting the initiative as program manager, working closely with ODOT, DriveOhio, and participating agencies to ensure consistent standards and successful deployment. “The selection of these nine agencies reflects the strength of Ohio’s public safety community and the seriousness with which this program has been approached,” said Don Mathis, Co-Founder and CEO SkyfireAI . "This pilot lays the foundation for how states can responsibly scale DFR programs today — and prepare for future capabilities as technology continues to evolve." Selected agencies will participate in a structured onboarding process beginning in early 2026, including hands-on vendor demonstrations, training, and program coordination. Operations are expected to begin in Spring 2026 and continue for approximately a year. The pilot program will evaluate operational effectiveness, response outcomes, and opportunities for future expansion. Ohio’s Statewide Drone First Responder Pilot Program has already drawn national attention as a potential blueprint for other states seeking to modernize emergency response while maintaining strong governance, safety, and public trust. ### About CAL Analytics: CAL Analytics is a small business focusing on the development of aviation and autonomous systems. Located in Dayton, OH and founded in 2010, CAL has expertise in navigation systems, remote sensing, signal analysis, and information fusion. CAL is a leader in UAS Traffic Management (UTM) and Advanced Air Mobility (AAM) technology, offering airspace management, mission management, detect and avoid, and in-time system-wide safety assurance (ISSA) solutions. Our mission is to provide agile and rigorous approaches to bring new technologies to the world. More information at calanalytics.com About SkyfireAI: SkyfireAI is an AI-native drone technology company redefining mission-scale autonomy for public safety, defense, and enterprise markets. Our cloud-connected and edge-enabled software platform powers autonomous swarming, Beyond Visual Line of Sight (BVLOS) operations, and real-time AI analytics—unlocking faster response, smarter decision-making, and safer operations. Built for scalability, SkyfireAI’s solutions deliver repeatable, high-value outcomes across thousands of missions, positioning the company to capitalize on a rapidly expanding global uncrewed systems market projected to exceed $100 billion by 2030. More information is available at skyfireai.com . About ODOT’s DriveOhio Initiative: DriveOhio is the state’s center for smart mobility, advancing connected, automated, shared, and electric transportation. The UAS Center, located in Springfield, OH, is the statewide resource for uncrewed aircraft systems testing, integration, and operations.
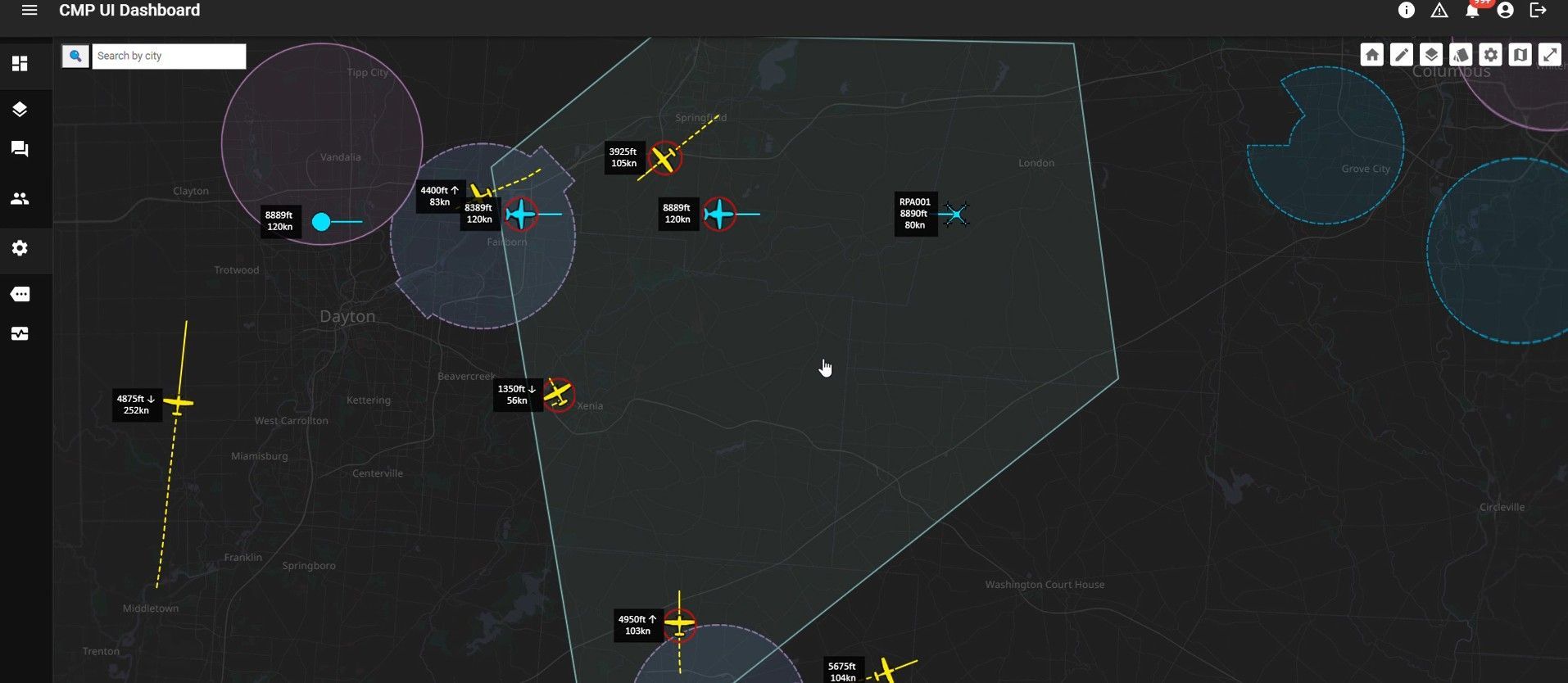
SPRINGFIELD, Ohio – January 27, 2026 – CAL Analytics, an innovator in advanced airspace management technologies, and AeroVironment, Inc. (“AV”) (NASDAQ: AVAV), a global defense technology leader delivering software-enabled disruptive autonomous systems, today announced the completed installation and initial operation of a new Beyond Visual Line of Sight (BVLOS) airspace management facility at the National Advanced Air Mobility Center of Excellence (NAAMCE) at Springfield-Beckley Municipal Airport in Springfield, Ohio. Initially developed under a Cooperative Research and Development Agreement (CRADA) between the Air Force Research Laboratory (AFRL) and the Ohio Department of Transportation (ODOT), the project now features an upgraded installation that integrates AV_Halo™ COMMAND, AV’s command and control (C2) architecture, with CAL Analytics’ Advanced Air Mobility (AAM) enterprise platform to establish the nation’s premiere test environment and management facility, where Department of War operators can safely conduct BVLOS missions in shared airspace utilizing existing Federal Aviation Administration (FAA) ground radar feeds. “This installation establishes the blueprint for how airports and states across the country can safely integrate uncrewed aircraft into existing airspace,” said Wahid Nawabi, Chairman, President and Chief Executive Officer at AV. “As the FAA defines the future of BVLOS rule-making, this facility provides the real-world operational data, safety validation, and interoperability framework regulators need. The system we’ve installed in Ohio isn’t just a mock-up or a test site — pending FAA approval it will be an operational and scalable model for nationwide deployment and the foundation for truly integrated air mobility.” The integration will support flight tests, evaluation, and day-to-day operations by routing AFRL’s access to the FAA’s ground-radar network through AV_Halo™ COMMAND — AV's modular, software-driven C2 architecture that fuses multiple enhanced sensor feeds, into a single, secure operating picture, giving operators continuous situational awareness for BVLOS mission planning and airspace safety. “AV_Halo is the connective tissue that turns a collection of sensors, radars, and platforms into a living, breathing airspace system,” said Stephen Lloyd, Senior Director C2, CUAS, and Tracking at AV. “By fusing FAA ground radar, and COTS surveillance sensors into a single, secure operating picture, AV_Halo delivers the assured visibility and machine-speed decision support needed for predictable BVLOS operations—and makes it possible to scale effortlessly from a single site to an entire statewide corridor.” When combined with CAL Analytics’ AAM enterprise platform, the system unifies radar and advanced DAA into a single real-time airspace view—enabling detect-and-avoid, extending autonomous BVLOS operations with precision and confidence. “Beyond Visual Line of Sight operations are the key to unlocking the next generation of air mobility,” said Dr. Sean Calhoun, Managing Director of CAL Analytics. “This facility will prove that BVLOS can be executed safely and reliably in shared airspace—and that matters because it sets the foundation for statewide corridors, national standards, and an entirely new layer of transportation infrastructure that will reshape how we move people, goods, data, and critical services across the country.” Pending full FAA approval, the facility will support local missions and real-time monitoring of UAS activity as AFRL, ODOT, the FAA, AV, and CAL Analytics collaborate to validate airspace-safety technologies, advance air-mobility corridors, drive economic development, and shape national BVLOS rules and integration standards. Plans are already underway to extend the system to enable corridors between Springfield and Columbus, Ohio, adding new radar sites and expanding detect-and-avoid coverage to support broader BVLOS operations across Ohio and additional sites nationwide.

(DAYTON, Ohio) – CAL Analytics is pleased to announce a strategic partnership with AirData UAV to integrate the Low Altitude Authorization and Notification Capability (LAANC) into AirData’s suite of drone operation services. This collaboration streamlines operations and creates safety awareness for drone pilots by providing real-time airspace data and automated authorizations for flight in controlled airspace. AirData is committed to delivering an intuitive customer experience, with CAL’s LAANC service fully integrating into its existing fleet management platform. All AirData users can request LAANC authorizations through both the AirData web portal and the AirData mobile app. “This partnership with AirData marks a significant milestone for CAL Analytics,” said Dr. Sean Calhoun, Founder and Managing Director of CAL Analytics. “By integrating the LAANC capability into AirData’s already extensive software platform, we are able to offer AirData users a seamless LAANC authorization experience, enhancing both safety and efficiency in drone operations.” CAL is an FAA-approved UAS Service Supplier (USS) of LAANC, a collaborative effort between the Federal Aviation Administration (FAA) and industry partners, providing drone pilots with access to controlled airspace at or below 400 feet. This partnership with CAL will allow AirData users to quickly and efficiently obtain necessary flight authorizations, ensuring compliance and improving operational efficiency. “Providing intuitive and straightforward workflows for our customers is of paramount importance to us,” said AirData CEO Eran Steiner. “We are thrilled to partner with CAL Analytics to deliver best-in-class LAANC services. AirData is dedicated to offering our customers seamless and comprehensive drone fleet management, encompassing everything from mission planning and pilot certifications to compliance and flight data analysis. The LAANC integration for 3rd parties like AirData is another key component of CAL Analytics’ suite of UAS airspace management services, providing critical real-time data and automated processes that support safe and efficient drone operations. This partnership underscores CAL Analytics’ commitment to advancing the capabilities of UAS and promoting safe airspace practices. AirData’s collaboration with CAL will provide a streamlined LAANC workflow for users, allowing for quick and straightforward access from a variety of devices and locations. LAANC requests can be tied into AirData’s Mission Planning tool set and are recorded in the user’s account for compliance and record-keeping. The AirData platform provides a extensive set of features that benefit the entirety of the drone flight workflow, from pre-flight checklists to live video streaming during flights, with sophisticated post-flight fleet data analytics to maximize the value and safety of drone operations. This unified fleet management approach allows customers to mitigate risk, improve fleet efficiency, and manage end-to-end compliance. About CAL Analytics CAL Analytics is focused on the development of aviation and autonomous systems. Located in Dayton, OH and founded in 2010, CAL has expertise in navigation systems, remote sensing, signal analysis, and information fusion. CAL is a leader in UAS Traffic Management (UTM) and Advanced Air Mobility (AAM) technology, offering airspace management, mission management, detect and avoid, and in-time system-wide safety assurance (ISSA) solutions. Our mission is to provide agile and rigorous approaches to bring new technologies to the world. To learn more about CAL Analytics, please visit https://calanalytics.com/ About AirData AirData is the largest online drone fleet data management and real-time flight streaming platform, serving over 330,000 users with 42 million flights uploaded to date, capturing an average of 25,000 high-resolution flight records a day. AirData is used by large fleet operators around the world as a comprehensive flight safety data analysis and crash prevention platform, with advanced maintenance, mission planning, pilot tracking, and easy-to-use live streaming. To learn more about AirData, please visit https://airdata.com/
